This project was designed to teach pathfinding techniques to FIRST Robotics Competition team #9114.
It’s a motion-planning pipeline for a square robot that can translate and rotate on a 2D map. The pipeline:
- converts a binary obstacle map into a 3D configuration space (x, y, θ),
- computes a Euclidean Distance Field over that space,
- constructs a probabilistic roadmap with collision-free edges,
- finally runs A* on the roadmap to find a path.
The pipeline persists intermediate artifacts so subsequent runs are faster.
Inputs & outputs
-
Input
FIELD.png: grayscale occupancy map (dark = obstacle). Threshold<128is treated as blocked.- Robot model: a square of side
s = 80px with full 360° orientation.
-
Outputs (cached/visual)
field.npy,edf.npy: 3D C-space occupancy and Euclidean Distance Field.nodes.pkl,n_adj.pkl: PRM nodes and adjacency.path.png: map with the planned trajectory drawn as oriented squares.
The algorithm
Given an occupancy map of a field like the one below,
- obstacles are expanded by the footprint of the robot; any pose where the robot would collide with an obstacle is marked blocked.
scipy.ndimage.distance_transform_edtis computed on the free configuration space, indicating the clearance to the nearest obstacle at every point.
Files:
configurations.py
ConfigHelper.make_config_space(...)does the per-angle expansion.ConfigHelper.make_edf()builds the EDF.ConfigSpacestores 3D occupancy, EDF, and provides utilities (distance, edge checking, save/load).
Then, it’s onto creating the probabilistic roadmap.
Network.add_random_nodes()draws poses using a clearance-dependent PDF, i.e. points closer to obstacles are more likely to be added to the PRM.scipy.spatial.cKDTreeis used to calculate nearest neighbors. I had to patch it to allow the angle dimension to wrap at 360°.- Sampled nodes are connected via
connect_node()to the k nearest neighbors to them. Edges are validated by tracing a 3D Bresenham-like line over (row, col, angle) and rejecting the edge if voxels are blocked.
File:
network.py
Network.build_tree()builds the k-d tree (periodic in θ).Network.connect_all(k)andconnect_node(...)add edges that pass collision checks viaConfigSpace.is_blocked_edge(...).
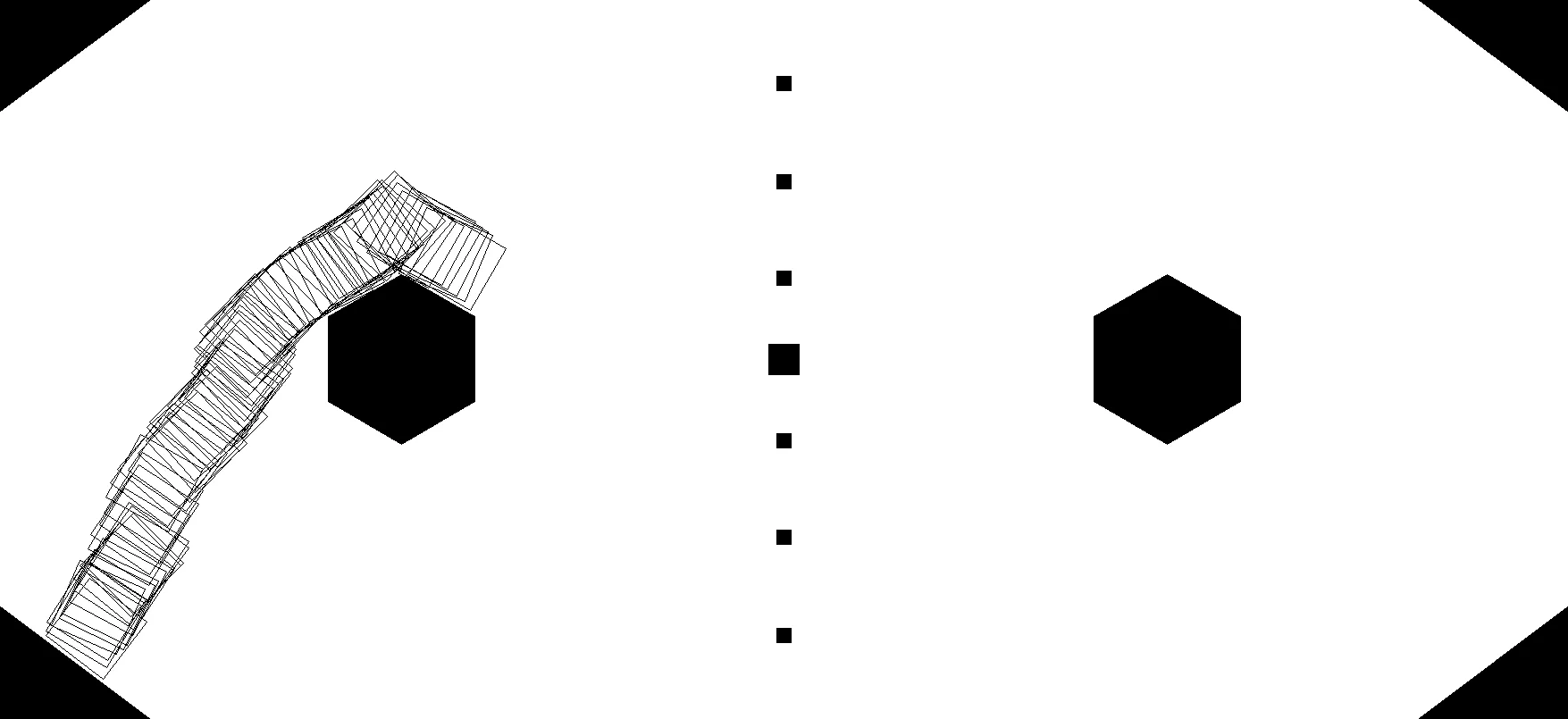
Once the graph is created, A* optimally traverses it from a start pose [e.g. (512, 512, 60°)] to a goal pose [e.g. (108, 101, 53°)]
File:
pathfinding.py
a_star(...)implements A*,ConfigSpace.distance(...)provides the angle-aware metric.
Running It
# Dependencies
pip install numpy scipy pillow
# Check that the field is in this directory
python main.pyOn the first run, it will generate and cache:
- C-space & EDF:
field.npy,edf.npy - PRM nodes & edges:
nodes.pkl,n_adj.pkl
Subsequent runs reuse these files to go straight to pathfinding.